






相機標定是三維攝影測量的基礎,決定測量系統的總體。相機標定確定內外參數,用于校正相機和鏡頭畸變,確定多個相機之間的相對位置。傳統的相機標定需要制作的標定塊或平面棋盤格,需要知道的三維坐標。傳統標定方法的缺點: 的標定塊只適合小幅面標定、不易制作大的標定塊;有待,標定較繁瑣不適于生產現場使用。(視頻演示)
技術原理(多相機多幅面的相機柔性自標定技術):
1) 自標定是指將內、外參數放在一起同時進行整體平差計算,也就是帶有附加參數的整體平差。既調整攝像機內參數、外參數,同時也調整標定平面模板特征點的物方坐標。
2) 該算法考慮了標定物的物方坐標誤差,同時鏡頭畸變模型中對徑向畸變、切向畸變和薄棱鏡畸變進行了考慮。
3) 一對物方點之間的距離,就可以利用捆綁調整的方法,同時計算出相機內、外參數和物方點的坐標,實現相機的標定。
該技術特點和:
1) 采用十參數相機模型補償各種畸變,以補償鏡頭帶來的成像畸變,包括徑向畸變、偏心畸變、像平面畸變、焦距和主點誤差等。
2) 無需標定板物方坐標,可以對不同視場單個或多個相機進行標定,標定視場從幾十毫米~幾米。標定過程自動化,適用于工業現場標定。
3) 標定參數初始值由攝影測量中相對定向和直接線性變換方法得到,然后使用捆綁調整算法整體優化物方坐標和相機內外參數。
4) 實驗結果表明,了8的標定。
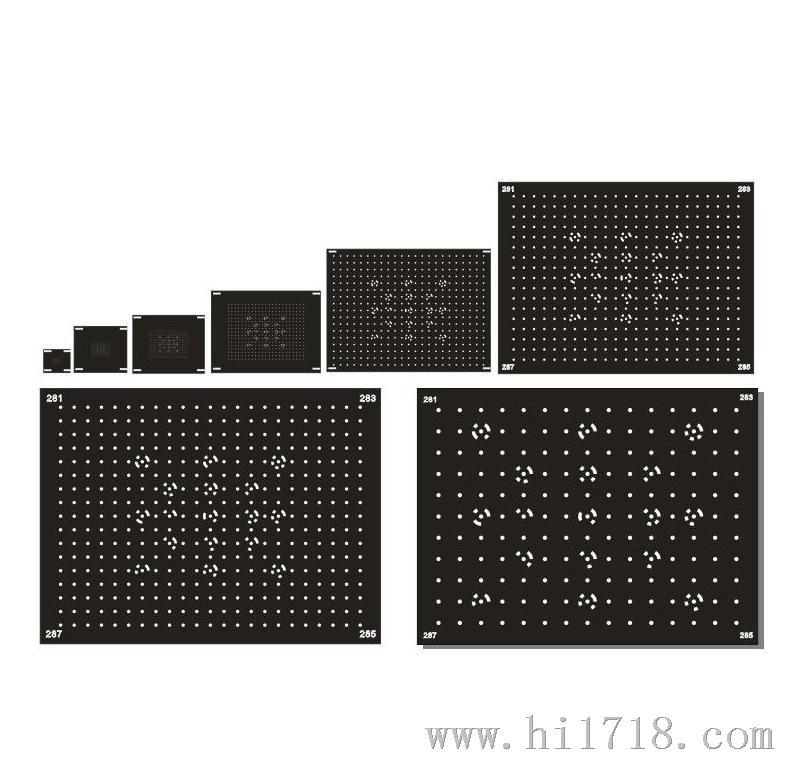
標定板(多相機多幅面的相機柔性自標定技術)
標定板主要用于小視場的標定。
標定板規格 | 標定測量幅面(長×寬) |
CP 400×300型號 | 400×300 mm ~500×375mm |
CP 256×192型號 | 256×192 mm ~400×300mm |
CP 192×144型號 | 192×144 mm ~256×192mm |
CP 128×96型號 | 128×96 mm ~192×144mm |
CP 64×48型號 | 64×48 mm ~128×96mm |
CP 32×24型號 | 32×24 mm ~64×48mm |
CP 16×12型號 | 16×12mm~32×24mm |
CP 8×6型號 | 8×6mm~16×12mm |
可定制其他規格 …… | 可定制其他規格 …… |
標定板
十字架標定板(多相機多幅面的相機柔性自標定技術)
標定十字架主要用于大視場的標定,可以拆裝,方便攜帶。
標定十字架規格 | 標定測量幅面(長×寬) |
CC5000型號 | 5000×5000mm~6000×6000mm |
C000型號 | 4000×4000mm~5000×5000mm |
CC3000型號 | 2000×2000mm~4000×4000 mm |
CC2000型號 | 2000×2000 mm~3000×3000 mm |
CC1500型號 | 1500×1125 mm~2000×1750mm |
CC1000型號 | 1000×750 mm~1500×1125mm |
CC500型號 | 500×375 mm~1000×750mm |
可定制其他規格 …… | 可定制其他規格 …… |
標定十字架
西安交通大學多自主研制的“相機多幅面的相機柔性自標定技術”,該技術解決了傳統標定方法需要高標定塊,實現了快速、方便、高相機標定,是三維攝影測量的基礎和。
相機標定技術是三維光學測量的技術,是測量的基礎。目前相機標定方法基本上都是平面標定和標定塊標定方法。其中國內單位使用多的是張正友的平面圓點圖案或棋盤格的標定算法,由于其算法是公開的,所以很多廠家直接采用張正友相機標定算法。但是該算法存在很多問題,無法高的測量,只能用于對要求不高的圖像模式識別研究,只能標定小視場的相機(如100mm~200mm)。平面圓點圖案的標定算法存在的主要問題如下:
1)要求標定板圓點圖案中,每個圓點的位置是已知的,而且要事先高測量圖案中圓點的位置,每一個標定板都須事先測量。圓點的位置誤差直接影響標定的。
2)要求標定板嚴格的平整度。對于小尺寸的標定板,如100mm~200mm,可以加工出較好的平整度,但是對于大尺寸的標定板,如200mm~2000mm,根本無法加工出高的標定板。
3)只能實現小幅面的相機標定,如100mm~200mm。因為無法加工出幾米長的高平板,所以無法實現高的大幅面相機標定,如200mm~2000mm。
因此,傳統的平面圓點圖案或棋盤格的標定算法無法滿足工業測量的要求,受標定板制作的各種誤差(如平面度誤差、圓點位置誤差等),標定無法,只能用于小視場相機標定(只能局限在100mm~200mm),只能用于對測量要求不高的圖像模式識別研究,其標定根本無法滿足工業測量的要求。
西安交通大學研制的“基于攝影測量的相機自標定技術”,該標定技術地解決了傳統的平面圓點圖案或棋盤格的標定算法,實現了高的相機標定。其優點如下:
1)高相機標定,相機標定是可控的,不是隨機的。傳統的平面圓點圖案或棋盤格的標定算法,其標定無法控制,隨機性很大。
2)可以完成多種視場的相機標定,可以完成1mm~10000mm視場的相機標定,實現可控的高相機標定。
更大視場可拆裝標定十字架
顯微鏡的三維標定技術
要實現顯微三維測量,先要解決顯微鏡的三維標定技術。 在“XJTUDIC三維數字散斑動態應變測量分析系統”的基礎上,研制了各種顯微鏡的微小視場三維標定方法
各種顯微三維標定









