








.jpg")
.jpg")
.jpg")
.jpg")
.jpg")
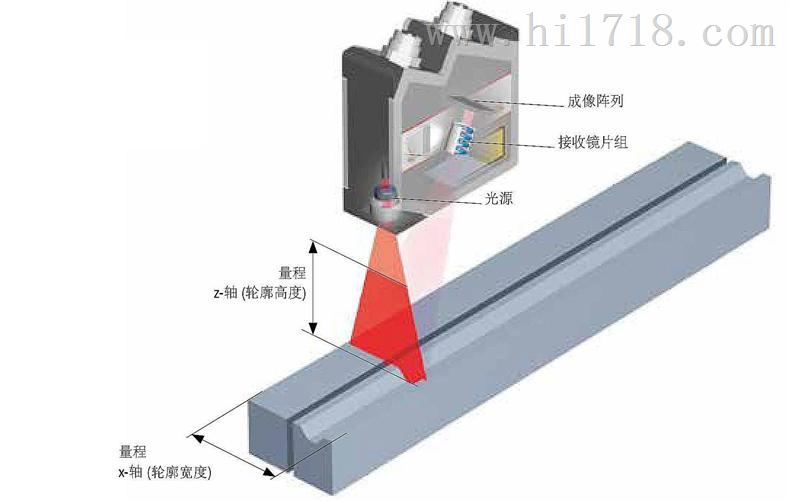
線激光測量系統
激光輪廓儀也可叫做輪廓傳感器(線激光),采用激光三角反射原理,采集不同材質表面的二維輪廓信息,通過的透鏡組,激光束被放大形成一條靜態激光線投射到被測物體表面上,激光線在被測物體表面形成漫反射,反射光透過高質量光學系統,被投射到敏感感光矩陣上,除了傳感器到被測表面的距離信息(Z軸),控制器還可以通過頭像信息計算得出沿著激光線的位置信息(X軸)。以傳感器為原心的二維坐標系內,輪廓儀測量出一組二維坐標值。移動被測物體或輪廓儀探頭,就可以得到一組三維測量值。
產品詳情線激光測量時,高度敏感的感光元件CMOS矩陣可以接收從被測物體反射回來的光線,形成高輪廓影像。任何輪廓改變都會改變投射到被測物體表面的激光線的形狀,從而改變感光器件矩陣上的影像結果。如果移動探頭或者被測物體,可以得到若干掃描線輪廓,將這些輪廓合成就可以行成3D影像結果。這個影像也被稱作“點云”,因為影像由數千個測量點所組成。
的技術,1280測量點每掃描線;測量頻率4000掃描線/秒。
應用范圍:
等高,間隙,外輪廓,厚度,高度,深度,邊沿,凹槽,角度,圓度,平整度,變形等高測量


